I. Introduction
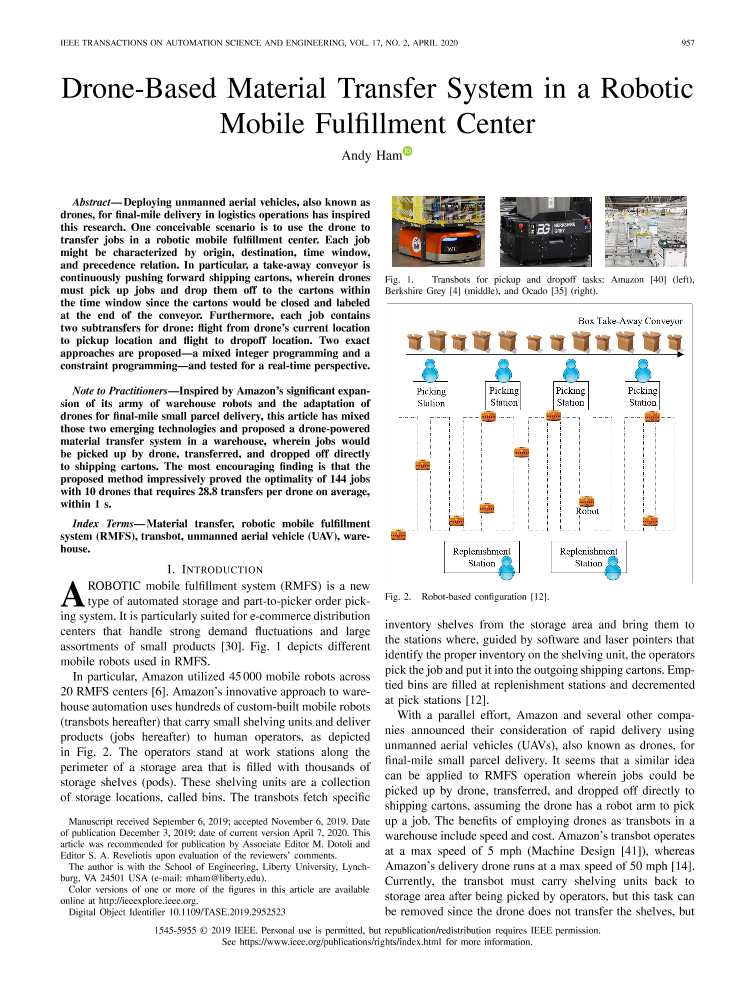
Arobotic mobile fulfillment system (RMFS) is a new type of automated storage and part-to-picker order picking system. It is particularly suited for e-commerce distribution centers that handle strong demand fluctuations and large assortments of small products [30]. Fig. 1 depicts different mobile robots used in RMFS.
Transbots for pickup and dropoff tasks: Amazon [40] (left), Berkshire Grey [4] (middle), and Ocado [35] (right).
